




Dvoosni servo pozicioner tipa C/L/U
Tehnički parametri
| Dvoosni servo pozicioner tipa C | Dvoosni servo pozicioner tipa L | Dvoosni servo pozicioner tipa U | |||||||||||
| Serijski broj | PROJEKTI | Parametar | Parametar | Parametar | NAPOMENE | Parametar | Parametar | Parametar | NAPOMENE | Parametar | Parametar | Parametar | NAPOMENE |
| 1 | Nazivno opterećenje | 200 kg |
500 kg | 1000 kg | Unutar radijusa R400mm/R400mm/R600mm od druge osi | 500 kg | 1000 kg | 2000 kg | Unutar radijusa R400mm/R600mm/R800mm od druge osi | 1000 kg | 3000 kg | 5000 kg | Unutar radijusa R600mm/R1500mm/R2000mm od druge osi |
| 2 | Standardni radijus giracije | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500 mm | R2000mm |
|
| 3 | Kut zakretanja prve osi | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | Kut rotacije druge osi | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Nazivna brzina uzdizanja prve osi | 50°/J | 50°/J | 15°/J |
| 50°/J | 50°/J | 17°/J |
| 17°/J | 17°/J | 17°/J |
|
| 6 | Nazivna brzina vrtnje druge osi | 70°/J | 70°/J | 70°/J |
| 70°/J | 70°/J | 17°/J |
| 24°/J | 17°/J | 24°/J |
|
| 7 | Ponavljanje točnosti pozicioniranja | ±0,10 mm | ±0,15 mm | ±0,20 mm |
| ±0,10 mm | ±0,10 mm | 17°/J |
| ±0,15 mm | ±0,20 mm | ±0,25 mm |
|
| 8 | Granična dimenzija okvira za pomicanje (duljina × širina × visina) | 1200 mm × 600 mm × 70 mm | 1600 mm × 800 mm × 90 mm | 2000 mm × 1200 mm × 90 mm |
| - | - | - |
| - | - | - |
|
| 9 | Ukupne dimenzije pozicijskog pomicača (duljina × širina × visina) | 2000 mm × 1100 mm × 1700 mm | 2300 mm × 1200 mm × 1900 mm | 2700 mm × 1500 mm × 2200 mm |
| 1500 mm × 500 mm × 850 mm | 2000 mm × 750 mm × 1200 mm | 2400 mm × 900 mm × 1600 mm |
| 4200 mm × 700 mm × 1800 mm | 5500 mm × 900 mm × 2200 mm | 6500 mm × 1200 mm × 2600 mm |
|
| 10 | Standardna dvoosna rotacijska ploča | - | - | - | - | Φ800 mm | Φ1200 mm | Φ1500 mm |
| Φ1500 mm | Φ1800 mm | Φ2000 mm |
|
| 11 | Visina središta rotacije prve osi
| 1200 mm | 1350 mm | 1600 mm |
| 550 mm | 800 mm | 1000 mm |
| 1500 mm | 1750 mm | 2200 mm |
|
| 12 | Uvjeti napajanja | Trofazni 200 V ± 10 % 50 Hz | Trofazni 200 V ± 10 % 50 Hz | Trofazni 200 V ± 10 % 50 Hz | S izolacijskim transformatorom | Trofazni 200 V ± 10 % 50 Hz | Trofazni 200 V ± 10 % 50 Hz | Trofazni 200 V ± 10 % 50 Hz | S izolacijskim transformatorom | Trofazni 200 V ± 10 % 50 Hz | Trofazni 200 V ± 10 % 50 Hz | Trofazni 200 V ± 10 % 50 Hz | S izolacijskim transformatorom |
| 13 | Klasa izolacije | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Neto težina opreme | Oko 800 kg | Oko 1300 kg | Oko 2000 kg |
| Oko 900 kg | Oko 1600 kg | Oko 2500 kg |
| Oko 2200 kg | Oko 4000 kg | Oko 6000 kg | |
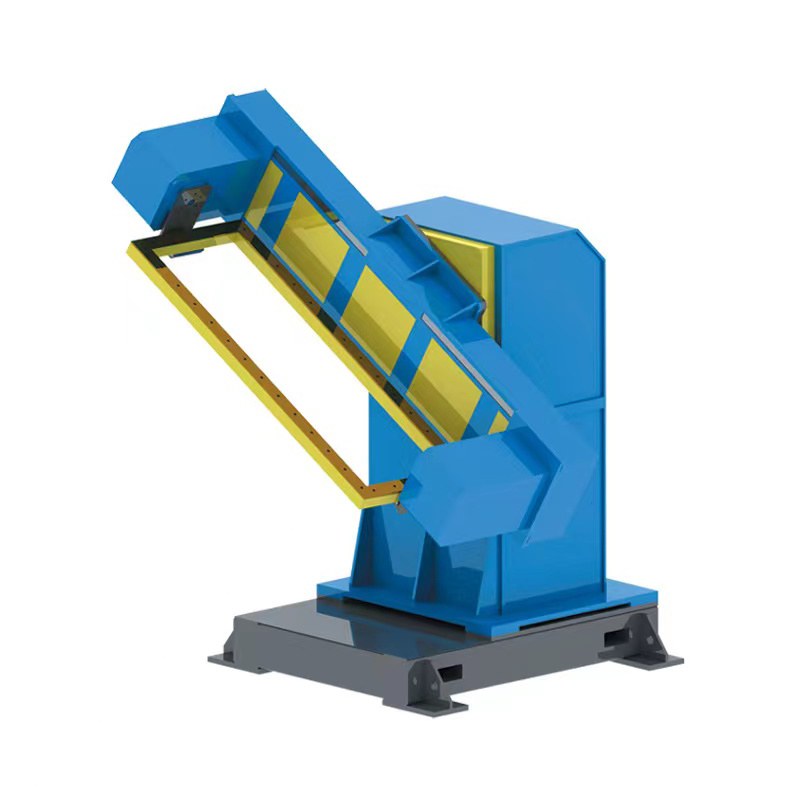
Dvoosni servo pozicioner tipa C
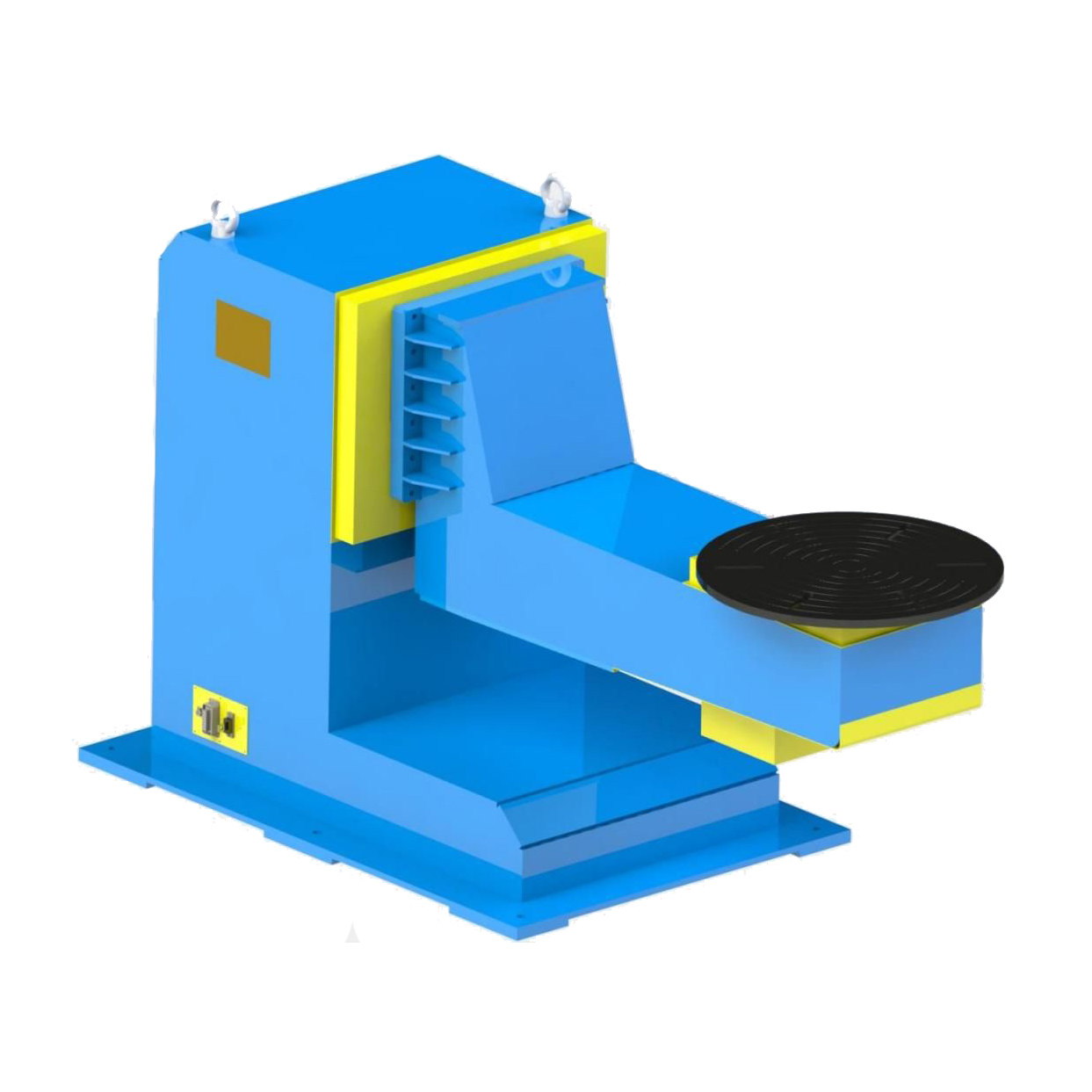
Dvoosni servo pozicioner tipa L

Dvoosni servo pozicioner tipa U
Uvod u strukturu
Dvoosni servo pozicioner uglavnom se sastoji od zavarenog integralnog okvira, okvira za zavarivanje pomicanja, AC servo motora i RV preciznog reduktora, rotacijskog nosača, vodljivog mehanizma, zaštitnog štita i električnog upravljačkog sustava. Zavareni integralni okvir je zavaren s visokokvalitetnim profilima. Nakon žarenja i ublažavanja naprezanja, obrađuje se profesionalnom strojnom obradom kako bi se osigurala visoka točnost obrade i točnost ključnih položaja. Površina je poprskana bojom protiv hrđe, koja je lijepa i izdašna, a boja se može prilagoditi prema zahtjevima kupca.
Zavareni okvir za pomicanje mora biti zavaren i oblikovan od visokokvalitetnog profilnog čelika te obrađen profesionalnom strojnom obradom. Površina mora biti strojno obrađena standardnim vijčanim otvorima za montažu alata za pozicioniranje, te mora biti provedena bojanje, crnjenje i zaštita od hrđe.
Rotacijska platforma odabire visokokvalitetni profilni čelik nakon profesionalne mehaničke obrade, a površina je strojno obrađena standardnim vijčanim otvorima za montažu alata za pozicioniranje, te se provodi tretman protiv crnjenja i hrđe.
Odabir AC servo motora i RV reduktora kao pogonskog mehanizma može osigurati stabilnost rotacije, točnost pozicioniranja, dugu trajnost i nisku stopu kvarova. Provodljivi mehanizam izrađen je od mesinga, što ima dobar vodljivi učinak. Provodljiva baza ima integriranu izolaciju koja može učinkovito zaštititi servo motor, robot i izvor napajanja za zavarivanje.
Električni upravljački sustav koristi japanski Omron PLC za upravljanje pozicionerom, sa stabilnim performansama i niskom stopom kvarova. Električne komponente odabrane su od poznatih domaćih i inozemnih marki kako bi se osigurala kvaliteta i stabilnost korištenja.











